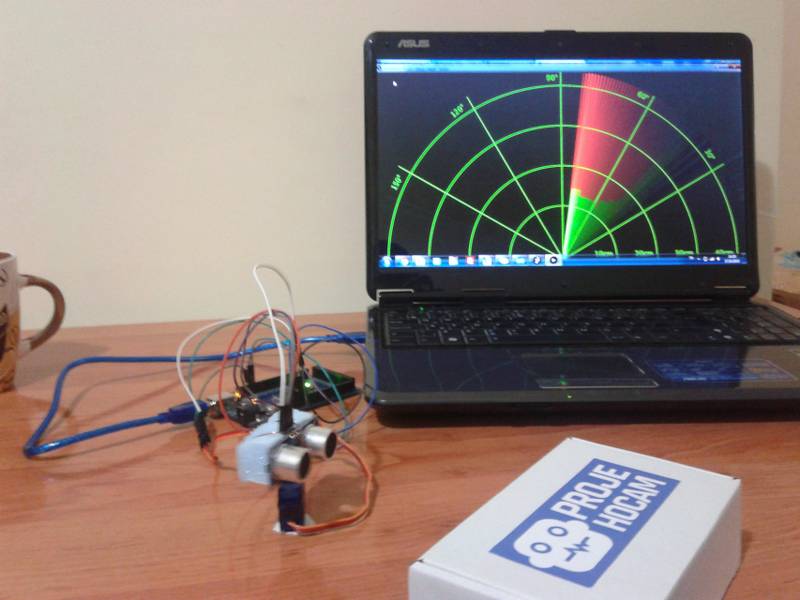
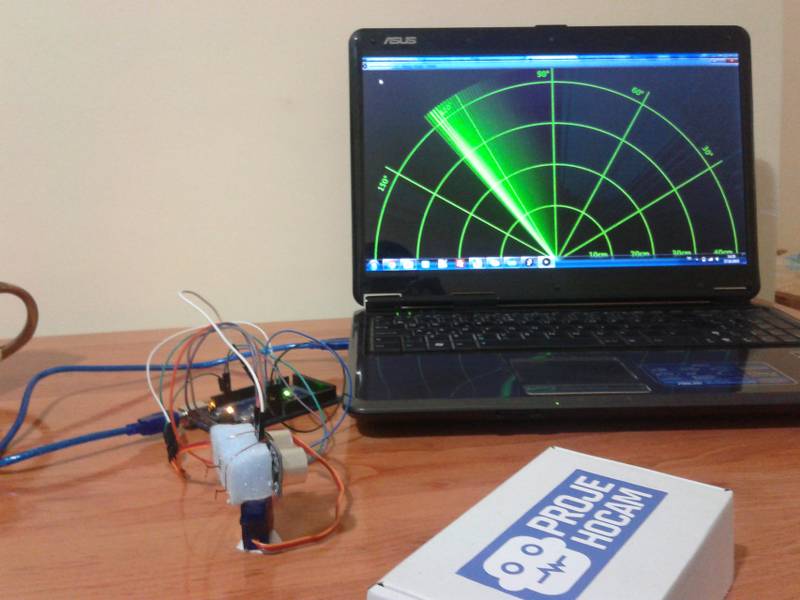
В этом проекте, мы будем делать ультразвуковой радар. Как известно, авиационные радары излучают направленный пучок микроволнового излучения, который отражается от объектов и возвращается обратно к антенне. Посчитав время возвращенного сигнала и угол поворота можно определить положение объекта в небе. Наш радар будет работать схожим образом, только он будет излучать ультразвуковые волны и высчитывать расстояние по эху. Из-за ограничения сервомотора угол сканирования будет 150 градусам.
Для проекта будет ужно:
- Arduino Mega
- Сервомотор 9g
- HCS-04 (Ультразвуковой датчик)
- Разъемы и провода для макетирования
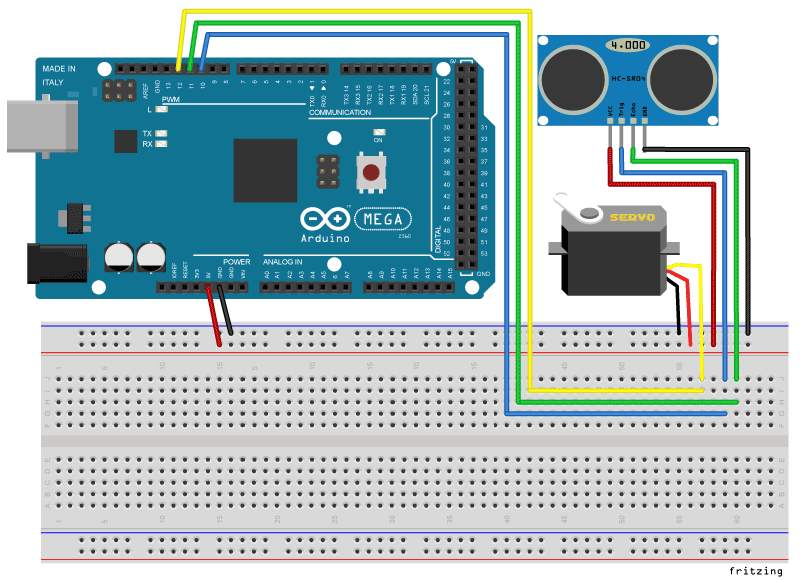
Соберите схему проекта и подключите Arduino к компьютеру по USB. Загрузите скетч программы в ваш arduino:
// Proje Hocam - Radar Projesi
// Murat DURAN - V2
#include <Servo.h>.
// Ultrasonik Sinyal pinleri
const int trigPin = 10;
const int echoPin = 11;
long duration;
int distance;
Servo myServo;
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
Serial.begin(9600);
myServo.attach(12); // Servo motor sinyal pini
}
void loop() {
// 15 derece ile 165 derece arasında dön
for(int i=15;i<=165;i++){ myServo.write(i); delay(30); distance = calculateDistance(); Serial.print(i); Serial.print(","); Serial.print(distance); Serial.print("."); } for(int i=165;i>15;i--){
myServo.write(i);
delay(30);
distance = calculateDistance();
Serial.print(i);
Serial.print(",");
Serial.print(distance);
Serial.print(".");
}
}
int calculateDistance(){
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance= duration*0.034/2;
return distance;
}
Для отображения принятых данных на компьютере скомпилируем в C++ простое приложение, которое будет строить график препятствий по данным ультразвукового датчика.
// Proje Hocam - Radar Projesi
// Murat DURAN - V2
import processing.serial.*; // kütüphane entegresi
import java.awt.event.KeyEvent;
import java.io.IOException;
Serial myPort;
String angle="";
String distance="";
String data="";
String noObject;
float pixsDistance;
int iAngle, iDistance;
int index1=0;
int index2=0;
PFont orcFont;
void setup() {
size (1366, 700);
smooth();
myPort = new Serial(this,"COM3", 9600); // Com portunu seçin
myPort.bufferUntil('.');
}
void draw() {
fill(98,245,31);
noStroke();
fill(0,4);
rect(0, 0, width, 1010);
fill(98,245,31); // yeşil renk
drawRadar();
drawLine();
drawObject();
drawText();
}
void serialEvent (Serial myPort) {
data = myPort.readStringUntil('.');
data = data.substring(0,data.length()-1);
index1 = data.indexOf(",");
angle= data.substring(0, index1);
distance= data.substring(index1+1, data.length());
iAngle = int(angle);
iDistance = int(distance);
}
void drawRadar() {
pushMatrix();
translate(683,700);
noFill();
strokeWeight(2);
stroke(98,245,31);
// draws the arc lines
arc(0,0,1300,1300,PI,TWO_PI);
arc(0,0,1000,1000,PI,TWO_PI);
arc(0,0,700,700,PI,TWO_PI);
arc(0,0,400,400,PI,TWO_PI);
// draws the angle lines
line(-700,0,700,0);
line(0,0,-700*cos(radians(30)),-700*sin(radians(30)));
line(0,0,-700*cos(radians(60)),-700*sin(radians(60)));
line(0,0,-700*cos(radians(90)),-700*sin(radians(90)));
line(0,0,-700*cos(radians(120)),-700*sin(radians(120)));
line(0,0,-700*cos(radians(150)),-700*sin(radians(150)));
line(-700*cos(radians(30)),0,700,0);
popMatrix();
}
void drawObject() {
pushMatrix();
translate(683,700);
strokeWeight(9);
stroke(255,10,10); // kırmızı renk
pixsDistance = iDistance*22.5;
// 40 cm ye kadar ölçer
if(iDistance<40){ line(pixsDistance*cos(radians(iAngle)),-pixsDistance*sin(radians(iAngle)),700*cos(radians(iAngle)),-700*sin(radians(iAngle))); } popMatrix(); } void drawLine() { pushMatrix(); strokeWeight(9); stroke(30,250,60); translate(683,700); line(0,0,700*cos(radians(iAngle)),-700*sin(radians(iAngle))); popMatrix(); } void drawText() { pushMatrix(); if(iDistance>40) {
noObject = "Out of Range";
}
else {
noObject = "In Range";
}
fill(0,0,0);
noStroke();
rect(0, 1010, width, 1080);
fill(98,245,31);
textSize(25);
text("10cm",800,690);
text("20cm",950,690);
text("30cm",1100,690);
text("40cm",1250,690);
textSize(40);
text("Object: " + noObject, 240, 1050);
text("Angle: " + iAngle +" °", 1050, 1050);
text("Distance: ", 1380, 1050);
if(iDistance<40) {
text(" " + iDistance +" cm", 1400, 1050);
}
textSize(25);
fill(98,245,60);
translate(390+960*cos(radians(30)),780-960*sin(radians(30)));
rotate(-radians(-60));
text("30°",0,0);
resetMatrix();
translate(490+960*cos(radians(60)),920-960*sin(radians(60)));
rotate(-radians(-30));
text("60°",0,0);
resetMatrix();
translate(630+960*cos(radians(90)),990-960*sin(radians(90)));
rotate(radians(0));
text("90°",0,0);
resetMatrix();
translate(760+960*cos(radians(120)),1000-960*sin(radians(120)));
rotate(radians(-38));
text("120°",0,0);
resetMatrix();
translate(840+900*cos(radians(150)),920-960*sin(radians(150)));
rotate(radians(-60));
text("150°",0,0);
popMatrix();
}
Статья вышла очень краткой, но человек знакомый с Arduino и C++ без труда разберется.