









Подвижный дальномер на сервомоторе часто используется в разных ардуино проектах. У меня возникла идея заставить ардуино следить за объектом двух плоскостях. Если объект будет смещаться - задача не терять его из поля зрения. Проект выполнен на ультразвуковом датчике HC-SR04 и паре сервомашинок.
Для изготовления потребуется:
- Любая ардуино плата
- Ультразвуковой датчик расстояния HC-SR04
- Одна-две сервомашинки SG-90
- Провода и руки
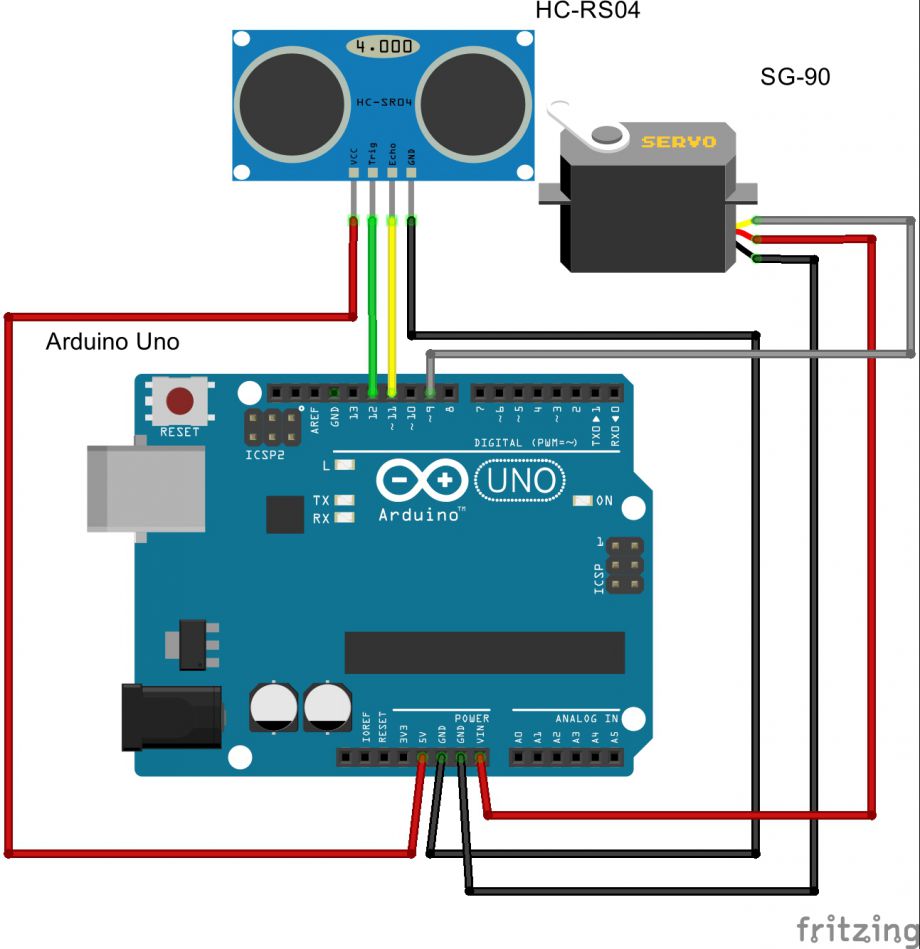
Схема подключения ультразвукового датчика слежения за объектом:
В первом скетче выполняется вращение от 30 до 150 градусов. Угол обзора можно задать для SG90 от 0 до 180 градусов. Это три положения: 30, 90 и 150 градусов. В коде программы задаем значение переменной distance которая определяет на каком расстоянии производить захват объекта в фокус. Как только будет зафиксировано приближение объекта ближе чем distance - сервомотор остановится и загорится светодиод.
Библиотека для ультразвукового датчика HC-RS04 Ultrasonic.h, для сервомотора - включена в состав программы Arduino IDE.
#include //подключаем библиотеку для сервомотора
#include "Ultrasonic.h" //подключаем библиотеку для ультразвукового датчика
Servo servoneck; // создаем объект серво-шея
Ultrasonic ultrasonic(12,11); //trigPin - 12; echoPin - 11;
const int ledPin = 13; // пин 13 – светодиод
const int distance = 30; // минимальное расстояние до попадения в фокус
void setup() {
Serial.begin(9600);
pinMode(ledPin, OUTPUT); // задаем светодиод - выходной пин
servoneck.attach(9); // attaches the servo on pin 9 to the servo object
servoneck.write(150);
digitalWrite(ledPin, 0); // выключаем светодиод
}
void loop() {
if (ultrasonic.Ranging(CM)>distance){
digitalWrite(ledPin, 0); // выключаем светодиод
servoneck.write(90);
delay(500);
if (ultrasonic.Ranging(CM)>distance){
digitalWrite(ledPin, 0); // выключаем светодиод
servoneck.write(150);
delay(500);
}
if (ultrasonic.Ranging(CM)>distance){
digitalWrite(ledPin, 0); // выключаем светодиод
servoneck.write(90);
delay(500);
}
if (ultrasonic.Ranging(CM)>distance){
digitalWrite(ledPin, 0); // выключаем светодиод
servoneck.write(30);
delay(500);
}
} else
digitalWrite(ledPin, 1); // включаем светодиод
delay(500);
}
Для эксперимента программа была модернизирована для добавления второго сервомотора. Он будет следить за объектом по вертикали. Что бы сервомашинки не молотили в режиме поиска постоянно можно было бы еще подключить датчик движения для активации поиска, а в остальное время переходить в режим ожидания.
Вот скетч, где добавлен второй сервомотор для поиска границ объекта по вертикали:
#include //подключаем библиотеку для сервомотора
#define trigPin 12 // подключаем Trig к пин 12. отправка сигнала
#define echoPin 11 // подключаем Echo к пин 11. прием ответа
Servo servoneck; // создаем объект серво-шея
Servo servohead; // создаем объект серво-голова
int s1, s2, s3; //создаем переменные для записи расстояний по трем направлениям
//-----------------------------------------------------------------------------------
//будем замер делать дважды и высчитывать среднюю арифметическую. для исключения ошибок.
//результат измерений будет записываться последовательно в переменные s_1 и s_2
int get_distance(){
long duration;
int s_1, s_2, average = -1;
// запись в s_1
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
s_1 = (int) duration / 58.2;
// запись в s_2
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
s_2 = (int) duration / 58.2;
// подсчитываем среднее арифметическое s_1 и s_2
average = (int) (s_1 + s_2) / 2;
//Serial.print("distance: ");
//Serial.println(average);
return average;
}
//---------------------------------------------------------------
void setup() {
Serial.begin(9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
servoneck.attach(9); // подключаем servoneck к pin 9
servohead.attach(10); // подключаем servohead к pin 10
servoneck.write(30); // устанавливаем серво-шея в первоначальное положение
servohead.write(30); // устанавливаем серво-голова в первоначальное положение
}
void loop() {
s1 = get_distance(); //делаем замер s1 в направлении 30 град.
if (s1 < 30) // если меньше заданного в см., то качаем головой
{
servohead.write(20);
delay(100);
servohead.write(30);
delay(100);
}
else // иначе, поворачиваем шею в положение 90 градусов(вперед)
{
servoneck.write(90);
delay(500);
}
s2 = get_distance(); //делаем замер s2 в направлении 90 град.
if (s2 <30) // если меньше заданного в см., то качаем головой
{
servohead.write(20);
delay(100);
servohead.write(30);
delay(100);
}
else // иначе, поворачиваем шею в положение 150 градусов(налево)
{
servoneck.write(150);
delay(500);
}
s3 = get_distance(); //делаем замер s3 в направлении 150 град.
if (s3 <30) // если меньше заданного, то качаем головой
{
servohead.write(20);
delay(100);
servohead.write(30);
delay(100);
}
else // иначе, поворачиваем шею в положение 90 градусов(прямо)
{
servoneck.write(90);
delay(500);
}
s2 = get_distance(); //делаем замер s2 в направлении 90 град.
if (s2 <30) // если меньше заданного, то качаем головой
{
servohead.write(20);
delay(100);
servohead.write(30);
delay(100);
}
else // иначе, поворачиваем шею в положение 30 градусов(налево)
{
servoneck.write(30);
delay(500);
}
}