


Публичные люди часто прибегают к использованию различных устройств для глушения GPS сигнала от спутников. Коптеро-фобия это диагноз. Жителям Москвы это знакомо не по наслышке. В неожиданных местах спутники попадают и становится глухо как в танке. Как работают такие устройства? Решил разобраться - как раз в руки мне попало такое устройство.
На рынке доступны в свободной продаже глушилки совсем за небольшие деньги. Использовать их я бы не рекомендовал т.к. от них больше вреда, чем пользы. Коптер и без gps сигнала может легко управляться, а водители без навигатора спасибо не скажут.

Если открыть корпус глушилки, то вид будет такой:

Видно, что устройство компактное и не сложное. При включении все спутники тут же пропадают. определение координат невозможно.
 Если у вас посреди Мкада на открытом месте неожиданно отказался работать навигатор - скорее всего вы в зоне действия такого генератора помех.
Если у вас посреди Мкада на открытом месте неожиданно отказался работать навигатор - скорее всего вы в зоне действия такого генератора помех.Но как же отловить такого вредителя? Задавшись этой целью я собрал плату на базе микросхемы NT1065 в котором скрыто многопоточное радиоприемное устройство.
В NT1065 находится четыре радио-тракта подключаемые к единому генератору-гетеродину. Схема:
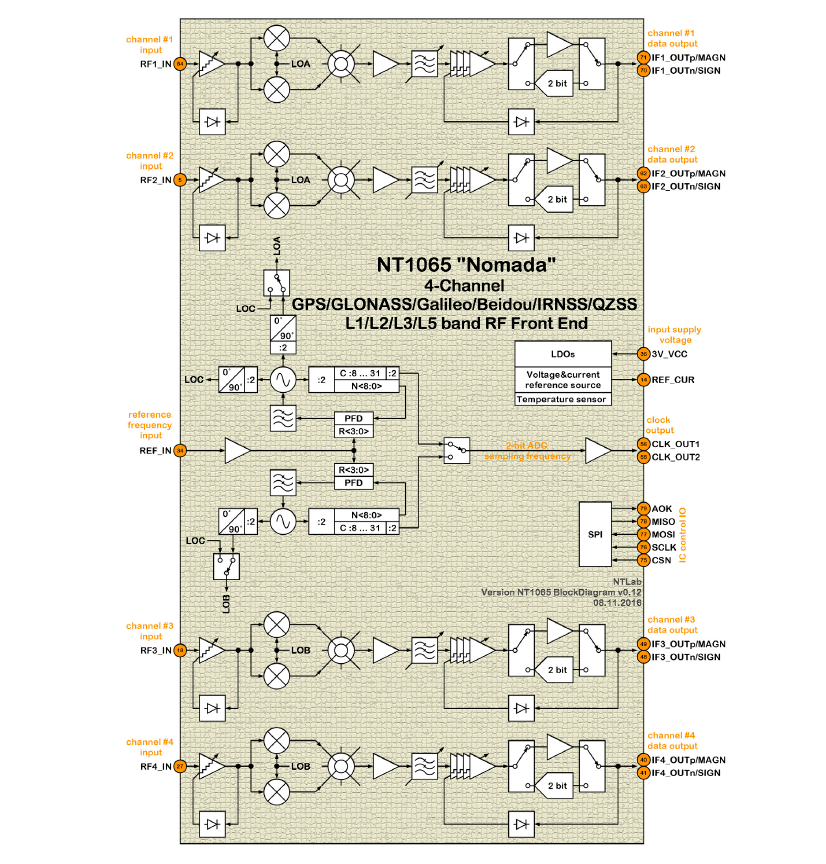
Единая опорная частота нам даст возможность создать четырехфазный пелингатор. Мы будем измерять смещение фаз друг относительно друга и за счет этого определять направление источника.
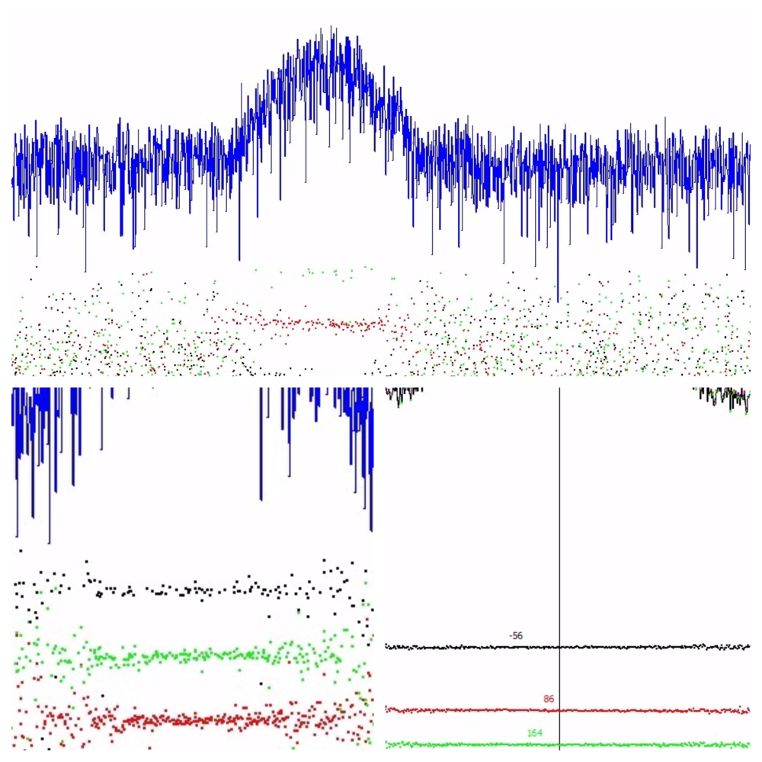
Схема пеленгатора указана ниже. Все четыре тракта подключаем к четырем одинаковым антеннам через малошумящие усилители. Усилители необязательны, но они помогают поднять сигнал выше уровня слабой согласованности антенн.
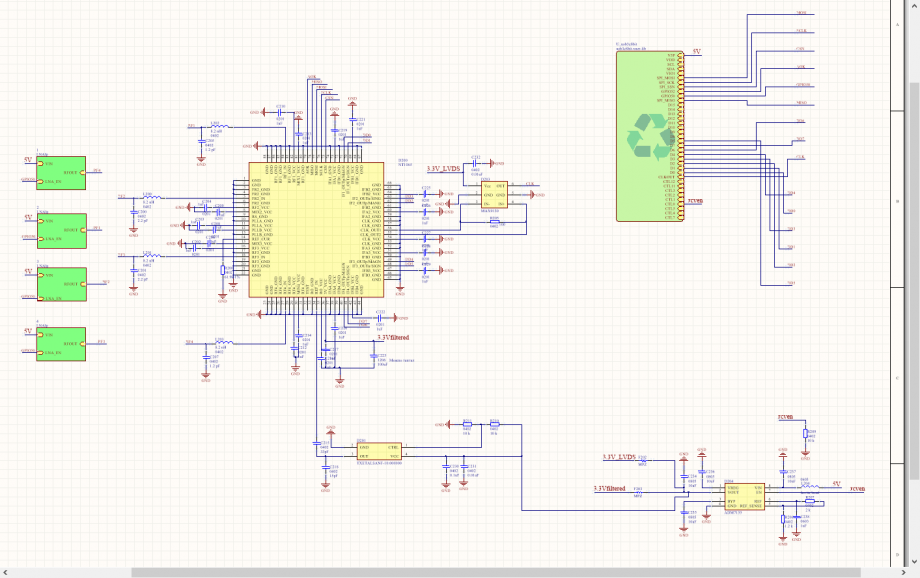
Антенны настроены на верхний диапазон L1, но с меньшей чувствительностью они будут работать с L2 - L5.
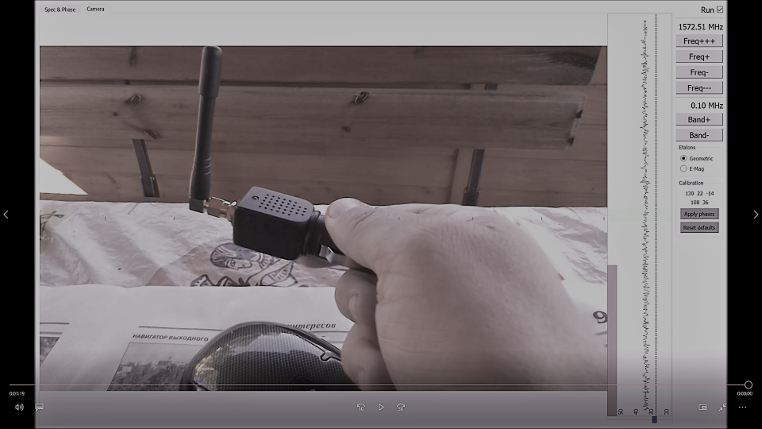
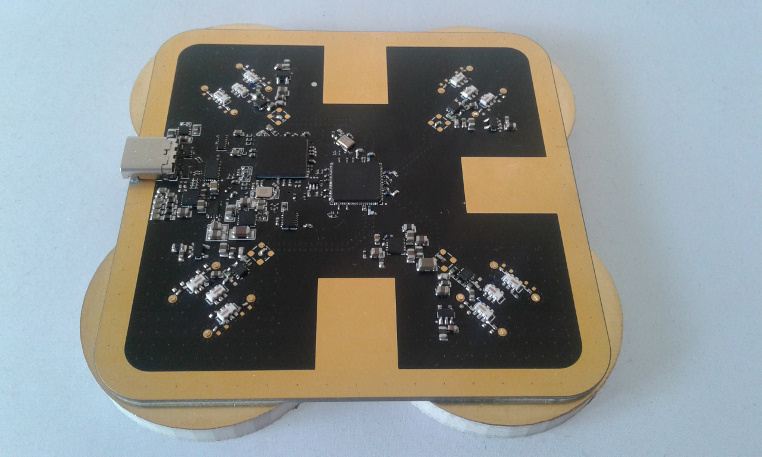
Собранный пеленгатор GPS глушилок:

Исходники — https://github.com/amungo/ItsFx3/tree/nut-peleng
Алгоритм работы ПО: считываются несколько непрерывных измерений, делаем их БПФ, усредняем частотные измерений БПФ (бины) в выбранной пользователем полосе и вычисляем направление - стандартное вычисление для формирования диаграммы направленности.
Формула будет такая:
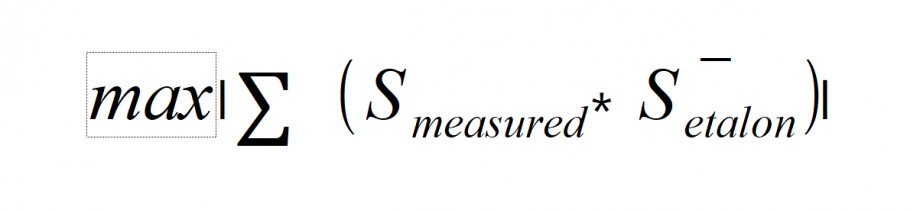
Конкретный код смотрите в GitHub'е, кому интересно.
Далее от максимума диаграммы откладываем 1 процент и делаем срез. Получаем «облако» векторов, которые направлены на источник сигнала. Эту область углов затеняем видео с камеры планшета. Расположение метки относительно видео с камеры нужно будет калибровать индивидуально.

Программа позволяет выбрать положение и ширину обрабатываемой полосы частот и задать порог уровня входного сигнала. Отображается значение суммарной мощности в полосе, что позволяет сначала грубо найти сектор.
Устройство определяет источник сигнала автоматически и не требует вращения, но в фокусе антенн чувствительность будет выше.
Если нет прямой видимости, то будут определяться отраженные точки с максимумом излучения, возможно наблюдение интерференции волн, что тоже дает ложные точки. При поиске это все нужно учитывать.
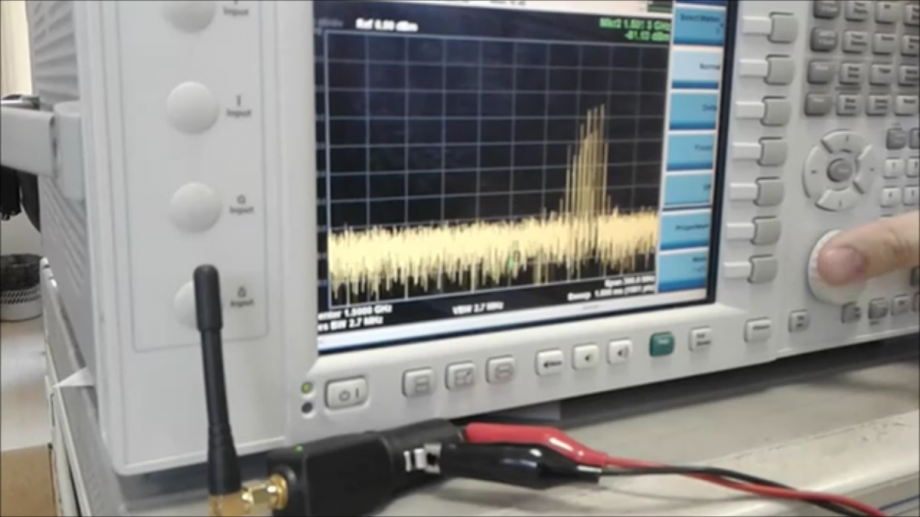
Они не особо распространены, но бьют гораздо дальше чем 5.8 ghz - по тому некоторые используют их.
Вот такой передатчик на 0,5 ват врубаешь и в десятках метрах от него уже gps не ловит.