









Роботы-пылесосы уже совсем не роскошь и цены на них постоянно падают, но покупать готовое устройство и делать его самому - разные вещи.
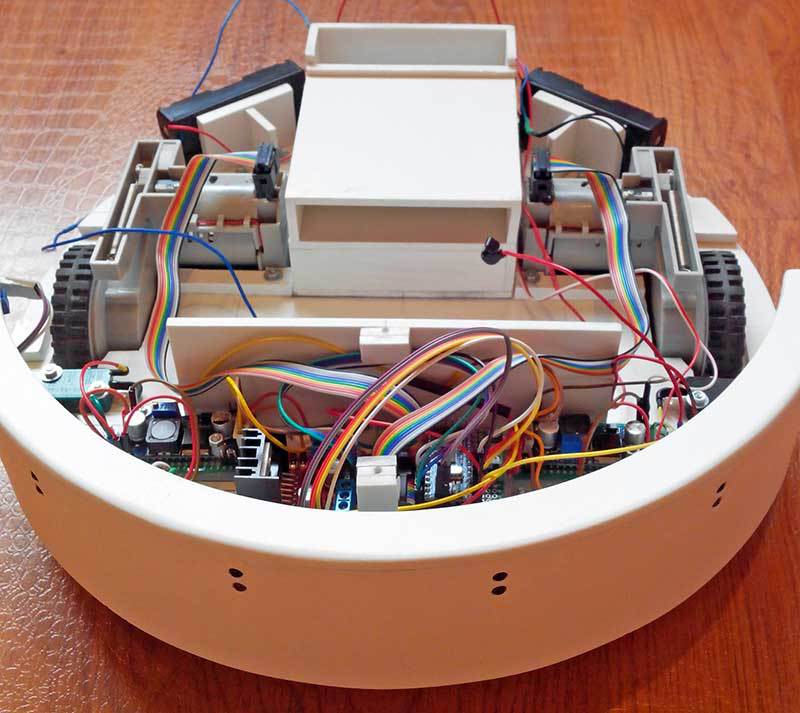
Конструкция робота пылесоса приближена к промышленным аналогам т.к. они используют такие датчики для ориентирования в пространстве.
Робот имеет два колеса с независимым приводом с помощью которых он движется и разворачивается. Что бы избегать припятсвий в корпус вмонтированы 6 ик датчиков. Для увеличения надежности определения стен сделан подвижный бампер с двумя микро выключателями (ик датчики плохо реагируют на черные поверхности).
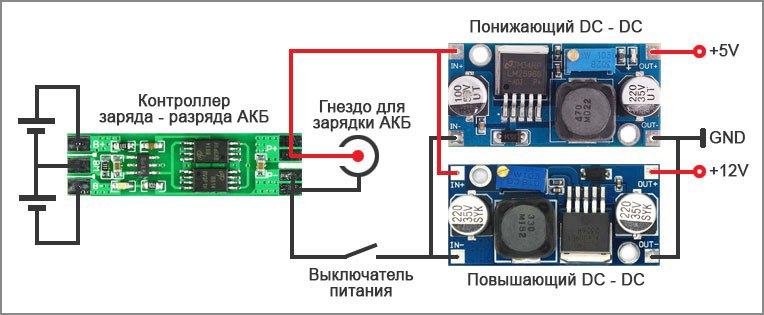
В качестве батареи использовалась четыре аккумулятора формата 18650. Подключены последовательно, что бы получить 12 вольт на питание двигателей. Вентилятор для всасывания пыли тоже 12-и вольтовый. На схеме есть контроллер заряда, он позволяет избежать повреждения аккумуляторов и имеет понижающую линию для питания Arduino +5 вольт.
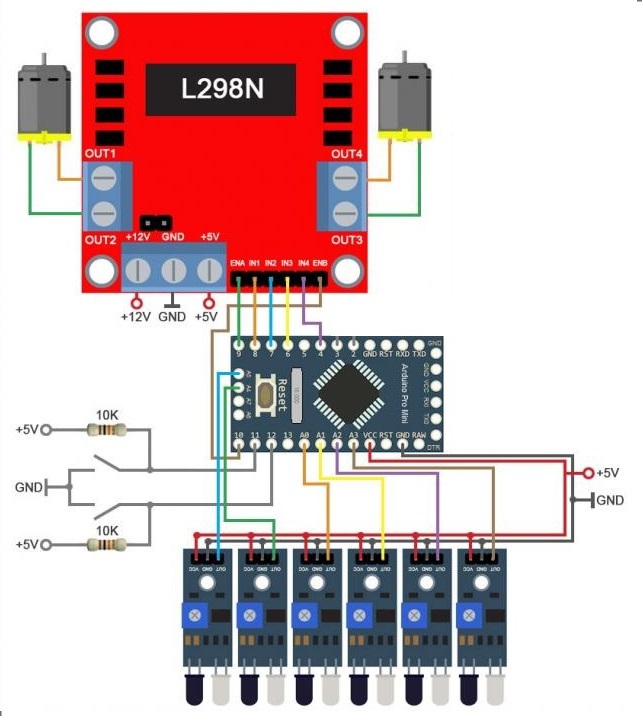
Компоненты для сборки: Arduino Pro, L298N драйвер мотора, два мотор-колеса, плата контроля заряда, ИК датчики 6 шт, куллер-турбина, ПВХ пластик для изготовления корпуса, АКБ 18650 4 шт., 2 моторчика для щеток, 2 микро выключателя столкновения
Скетч, который движет робота пылесоса в случайном порядке:
#define mot_ena 9 //пин ШИМа левого мотора
#define mot_in1 8 //пин левого мотора
#define mot_in2 7 //пин левого мотора
#define mot_in3 6 //пин правого мотора
#define mot_in4 4 //пин правого мотора
#define mot_enb 10 //пин ШИМа правого мотора
#define ir_1 A0 //пин 1 ИК-датчика
#define ir_2 A1 //пин 2 ИК-датчика
#define ir_3 A2 //пин 3 ИК-датчика
#define ir_4 A3 //пин 4 ИК-датчика
#define ir_5 A4 //пин 5 ИК-датчика
#define ir_6 A5 //пин 6 ИК-датчика
#define lev_vik 11 //пин левого выключателя
#define pra_vik 12 //пин правого выключателя
//для выравнивания скорости колес
byte max_skor_lev = 254;
byte max_skor_prav = 244;
//---------------------------------
byte min_skor = 0;
void setup() {
randomSeed(analogRead(A7));
// пины энкодеров на вход
pinMode(3, INPUT); // пин левого энкодера на вход
pinMode(2, INPUT); // пин правого энкодера на вход
//-------------------------
// пины для левого и правого моторов на выход
pinMode(mot_ena, OUTPUT);
pinMode(mot_in1, OUTPUT);
pinMode(mot_in2, OUTPUT);
pinMode(mot_in3, OUTPUT);
pinMode(mot_in4, OUTPUT);
pinMode(mot_enb, OUTPUT);
//-------------------------------------------
// пины ИК-датчиков на вход
pinMode(ir_1, INPUT);
pinMode(ir_2, INPUT);
pinMode(ir_3, INPUT);
pinMode(ir_4, INPUT);
pinMode(ir_5, INPUT);
pinMode(ir_6, INPUT);
//-------------------------
// пины левого и правого выключателей на вход
pinMode(lev_vik, INPUT);
pinMode(pra_vik, INPUT);
//---------------------------
delay(3000);
ROB_VPERED();
}
void loop() {
// если срабатывает левый выключатель на бампере
if (digitalRead(lev_vik) == LOW)
{
ROB_STOP();
delay(200);
ROB_NAZAD();
delay(150);
ROB_STOP();
delay(200);
ROB_PRAV();
delay(random(400, 1500));
ROB_STOP();
delay(200);
ROB_VPERED();
}
//-----------------------------------------------
// если срабатывает правый выключатель на бампере
if (digitalRead(pra_vik) == LOW)
{
ROB_STOP();
delay(200);
ROB_NAZAD();
delay(150);
ROB_STOP();
delay(200);
ROB_LEV();
delay(random(400, 1500));
ROB_STOP();
delay(200);
ROB_VPERED();
}
//-----------------------------------------------
// если срабатывает 2 ИК-датчик
if (digitalRead(ir_2) == LOW)
{
ROB_STOP();
delay(200);
ROB_PRAV();
delay(random(200, 1100));
ROB_STOP();
delay(200);
ROB_VPERED();
}
//-----------------------------------------------
// если срабатывает 3 ИК-датчик
if (digitalRead(ir_3) == LOW)
{
ROB_STOP();
delay(200);
ROB_PRAV();
delay(random(200, 1100));
ROB_STOP();
delay(200);
ROB_VPERED();
}
//-----------------------------------------------
// если срабатывает 4 ИК-датчик
if (digitalRead(ir_4) == LOW)
{
ROB_STOP();
delay(200);
ROB_LEV();
delay(random(200, 1100));
ROB_STOP();
delay(200);
ROB_VPERED();
}
//-----------------------------------------------
// если срабатывает 5 ИК-датчик
if (digitalRead(ir_5) == LOW)
{
ROB_STOP();
delay(200);
ROB_LEV();
delay(random(200, 1100));
ROB_STOP();
delay(200);
ROB_VPERED();
}
//-----------------------------------------------
// если срабатывает 1 ИК-датчик
if (digitalRead(ir_1) == LOW)
{
ROB_PRAV();
delay(10);
ROB_VPERED();
}
//-----------------------------------------------
// если срабатывает 6 ИК-датчик
if (digitalRead(ir_6) == LOW)
{
ROB_LEV();
delay(10);
ROB_VPERED();
}
//-----------------------------------------------
}
// поворот направо на месте
void ROB_PRAV()
{
// левый мотор вперед
digitalWrite(mot_in1, LOW);
digitalWrite(mot_in2, HIGH);
analogWrite(mot_ena, max_skor_lev);
// правый мотор назад
digitalWrite(mot_in3, LOW);
digitalWrite(mot_in4, HIGH);
analogWrite(mot_enb, max_skor_prav);
}
//-----------------
// поворот налево на месте
void ROB_LEV()
{
// правый мотор вперед
digitalWrite(mot_in3, HIGH);
digitalWrite(mot_in4, LOW);
analogWrite(mot_enb, max_skor_prav);
// левый мотор назад
digitalWrite(mot_in1, HIGH);
digitalWrite(mot_in2, LOW);
analogWrite(mot_ena, max_skor_lev);
}
//---------------------
// езда вперед
void ROB_VPERED()
{
// левый мотор вперед
digitalWrite(mot_in1, LOW);
digitalWrite(mot_in2, HIGH);
analogWrite(mot_ena, max_skor_lev);
// правый мотор вперед
digitalWrite(mot_in3, HIGH);
digitalWrite(mot_in4, LOW);
analogWrite(mot_enb, max_skor_prav);
}
//-------------------------------------
// езда назад
void ROB_NAZAD()
{
// левый мотор назад
digitalWrite(mot_in1, HIGH);
digitalWrite(mot_in2, LOW);
analogWrite(mot_ena, max_skor_lev);
// правый мотор назад
digitalWrite(mot_in3, LOW);
digitalWrite(mot_in4, HIGH);
analogWrite(mot_enb, max_skor_prav);
}
//------------------------------------
// стоп
void ROB_STOP()
{
// левый мотор стоп
digitalWrite(mot_in1, LOW);
digitalWrite(mot_in2, LOW);
analogWrite(mot_ena, min_skor);
// правый мотор стоп
digitalWrite(mot_in3, LOW);
digitalWrite(mot_in4, LOW);
analogWrite(mot_enb, min_skor);
}
//--------------------------------