





При разработке устройств на микроконтроллере неминуемо сталкиваемся с проблемой измерения и ужасных помех. Использование сырых данных становится невозможным и на выручку приходит фильтр Калмана.
В большинстве случаев используются простые сглаживания по среднему значению от нескольких измерений. Выходные значения будут казаться адекватными без всплесков, но будет обеспечивать низкую точность в отношении реального значения.
Фильтрация Калмена лишена этих недостатков. Американский математик Рудольфа Калмана обеспечил такие результаты благодаря тому, что система может учитывать управляющее воздействие на систему, если известны свойств; этого воздействия.
Если двигаться на автомобиле и получая текущие координаты по GPS, мы сможем увеличить точность определения положения, если будем учитывать скорость и направление движения автомобиля, предугадывая где будет находится автомобиль в следующий момент времени. Скорость зависит от степени нажатия на педаль газа. И это все можно заложить в алгоритм фильтра, в конечном итоге получая более точные координаты, нежели полученные от одного GPS приемника.
В чистом фиде данный фильт редко используется. Обычно принимается его упрощенная версия без матриц и многоэтажных уравнений. Будет всего одна формула, которая выводится из всей горы матриц, при условии если мы пренебрежем расчетом управляющего воздействия. Формула в конечном итоге имеет следующий вид:

где  - результирующее значение текущего вычисления,
- результирующее значение текущего вычисления,
 - коэффициент стабилизации,
- коэффициент стабилизации,
 - исходное значение текущего измерения,
- исходное значение текущего измерения,
 - результирующее значение предыдущего вычисления.
- результирующее значение предыдущего вычисления.
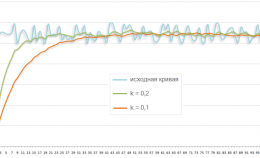
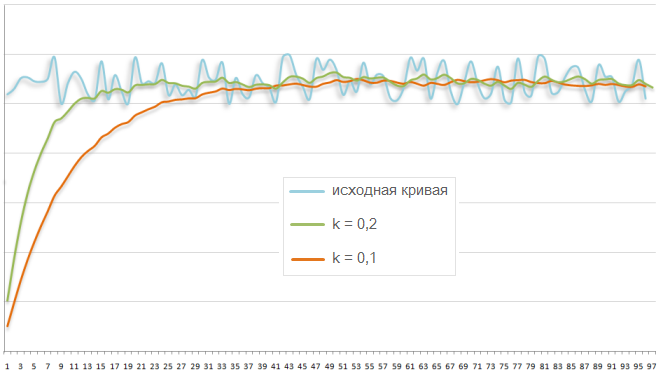
Потребуется подобрать это коэффициент стабилизации, он должен быть больше 0 и не больше 1. Чем меньше коэффициент, тем сильнее сглаживаются данные, но при этом увеличивается время стабилизации. Вот пример, показывающий поведение результирующей кривой, при разных коэффициентах:
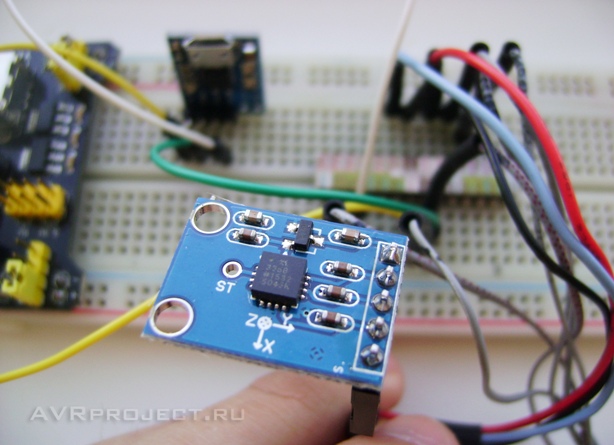
Для испытания я взял аналоговый акселерометр ADXL335 и подключил его к микроконтроллеру ATMega8, считывание данных идет через АЦП.
Код для Bascom-AVR>
$regfile = "m8def.dat" 'микроконтроллер ATmega8 $crystal = 8000000 'частота работы 8МГц $baud = 9600 'скорость передачи 9600 бод $hwstack = 32 $swstack = 32 $framesize = 32 'конфигурируем АЦП Config Adc = Single , Prescaler = 128 , Reference = Internal Dim R As Word 'переменная R в которую будем записывать показания с АЦП declare sub kalman 'объявляем подпрограмму фильтрации 'переменные для фильтра dim Mn as single 'результирующее значение dim An as Single 'исходное значение dim Mn1 as Single 'результат вычисления в предыдущей интерации dim k as single 'коэффициент стабилизации k = 0.1 'устанавливаем коэффициент Start Adc Do R = Getadc(0) 'считывание данных с акселерометра An = R call Kalman 'вызываем подпрограмму фильтрации Print R ; ";" ; round (Mn) 'отправляем данные в терминал Waitms 50 Loop End 'подпрограмма фильтрации sub Kalman Mn = k * An An = 1 - k Mn1 = Mn1 * An Mn = Mn + Mn1 Mn1 = Mn end sub
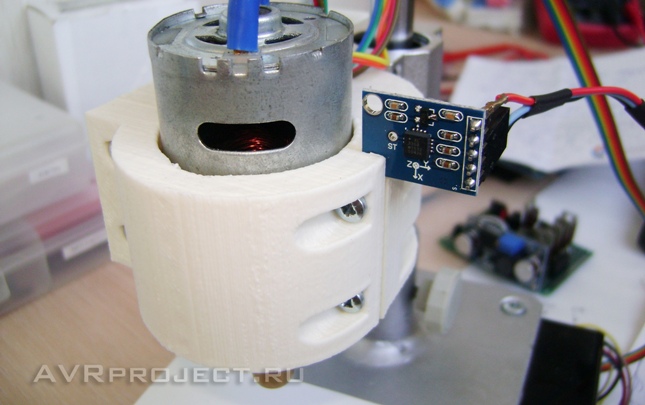
Данные от микроконтроллера AVR передаются через UART на компьютер и записываются в EXEL. Для увеличения количества шума датчик закреплен на электродвигателе.
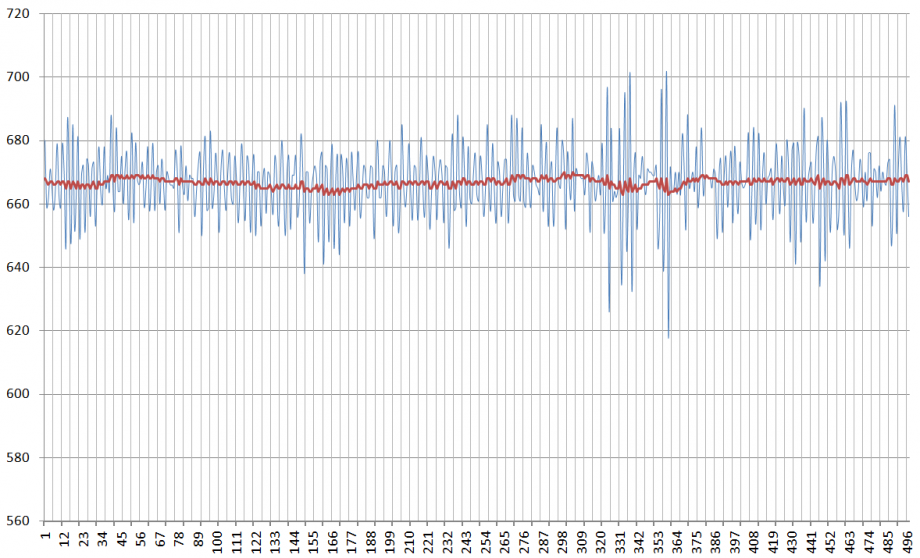
Вибрация от двигателя передалась акселерометру и вот что получилось в результате: синий - исходный сигнал, красный - после фильтрации
Метод очень даже хорош. Пример аналогичного фильтра низких частот для Arduino:
#include <SerialFlow.h>
SerialFlow rd;
#define BAUD_RATE 9600
const byte led_pin = P1_0;
const byte acc_x_pin = A5;;
short acc_x_raw, acc_x, acc_xf;
float FK = 0.1;
void setup() {
pinMode(led_pin, OUTPUT);
rd.setPacketFormat(SerialFlow::COMPLEX_1, 2, 2);
rd.begin(BAUD_RATE);
acc_xf = 0;
}
void loop() {
acc_x_raw = analogRead(acc_x_pin);
acc_x = acc_x_raw - 1023/2.0;
acc_xf = (1-FK)*acc_xf + FK*acc_x;
rd.setPacketValue(acc_x);
rd.setPacketValue(acc_xf);
rd.sendPacket();
delay(20);
}