






Собрать тяжелый квадрокоптер способный нести камеру не так сложно. Нужно лишь прикупить несколько компонентов, а раму можно собрать самому. Составить конкуренцию таким монстрам как коптеры phantom - не получится, но наша задача несколько проще. Поехали.

Что нам понадобится для сборки нашего квадрокоптера?
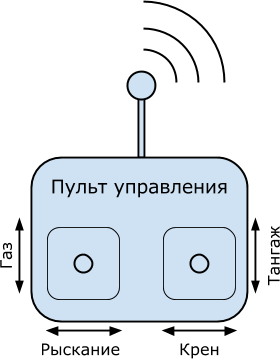
- Аппаратура Fs-T6 или любая другая (пульт + приемник. Не менее 4 каналов) - 1 шт.
- Батарея Li-Po 220A/h 40C - 1 шт.
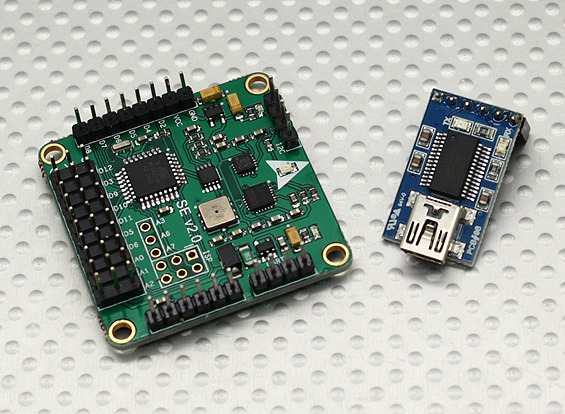
- Полетный контроллер WultiWii SE v2.5 + FTDI-USB переходник - 1 шт.
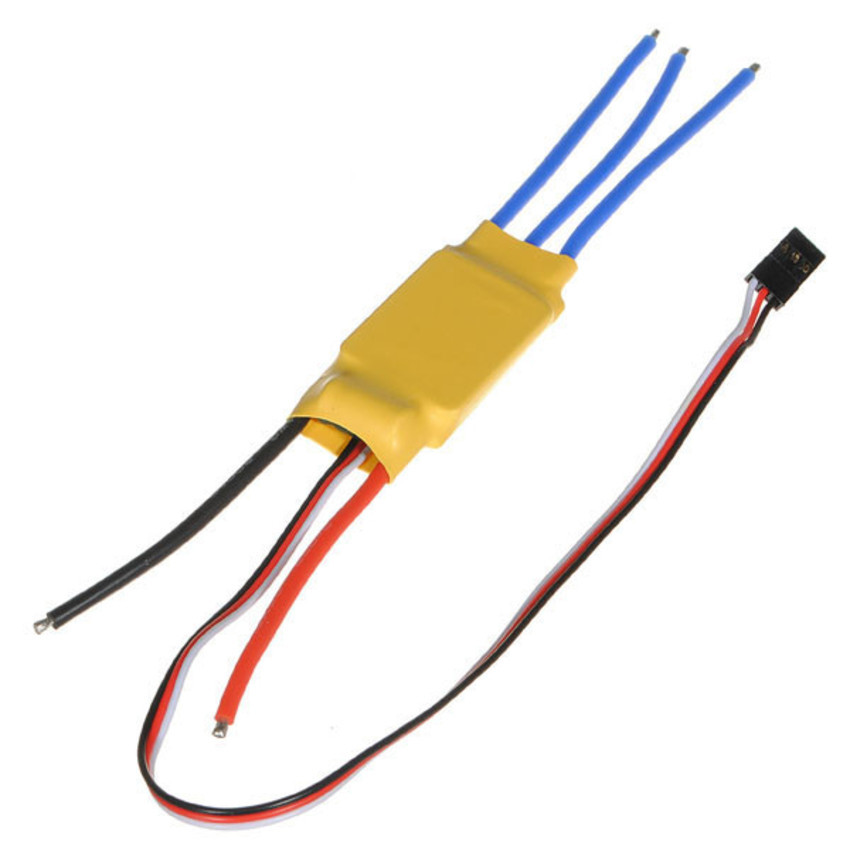
- Контроллеры двигателя ESC 30A - 4 шт.
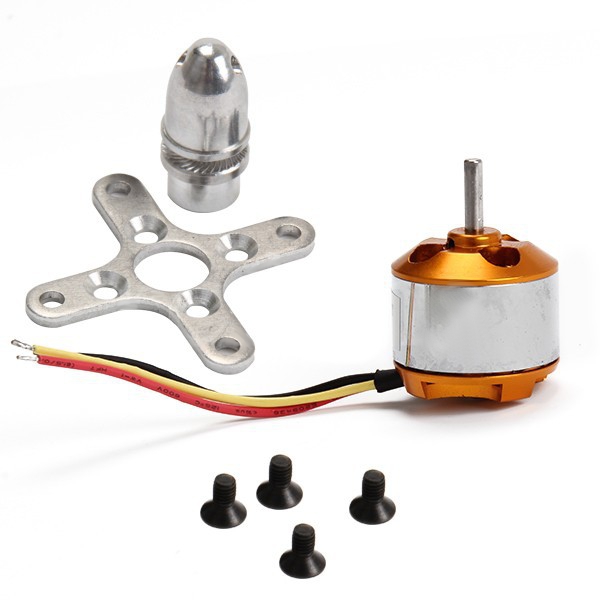
- Бесколлекторные моторы 1000Kv XXD2212 - 4 шт.
- Пропеллеры с цангами GF8045 - 4 шт.
Коптер будет тяжелый и по тому для его подъема потребуется батарея с большими токами разряда.Класс 40C подходит. Ее же я использую для своего шерт корс трака.

Пропеллеры взял крупные GF8045. Они хорошо работают на низких скоростях набегающего воздушного потока. Отлично подходят для квадрокоптера и никак не подходят для самолета. (по неопытности пытался летать на летающем крыле с ним. Оно очень бодро срывалось с места, но максимальная скорость была так себе.)
В моем случае материал лопастей - отстой. Черные пропеллеры при легком ударе рассыпаются на части. Лучше использовать оранжевые или красные.

ESC 30A самые распространенные и дешевые, что можно найти у китайцев. Взял noname на свой страх и риск. Причем попались из разных партий. Боялся, что будут по разному работать, но зря боялся.
Для лопастей GF8045 подходят низкооборотистые моторы XXD2212 на 1000Kv. Они тоже дешевые и без труда такие можно найти на любом китайском сайте. 4 таких моторов легко поднимают груз весом 2 кг. Этого достаточно, что бы коптер пулей улетал в небо на полном газу.
Подобрались к главному компоненту - Multiwii SE v2.5. Я очень люблю этот полетный контроллер. В его основе чип atmega с прошивкой на arduino, а это значит, что можно при желании как угодно переписывать код прямо на коленке. В интернете можно найти множество различных прошивок на любой вкус и цвет. Гибкость и открытость программного кода дает возможность простым смертным по инструкциям из интернета настраивать котроллер для управления самолетом, летающим крылом, квадрокоптером, трикоптером...
Для летающего крыла доступны различные стабилизации для упрощения полета, подключение по I2C GPS модуля для функции возврата домой и еще много чего еще.
Для подключения контроллера к компьютеру для настройки нам потребуется FTDI-USB переходник. Он подключается к FTDI разъему на плате MultiWii и конектится к USB порту компьютера.
После подключения вам нужно будет залить прошивку в контроллер. Мы будем использовать стандартную прошивку. Скачиваем ее с официального сайта http://www.multiwii.com/wiki/
Для программирования и правки кода нужно будет еще установить среду Arduino IDE.
В архиве с прошивкой будет две папки: MultiWii с Arduino кодом прошивки и MultiWiiConf программой для калибровки прошитого котроллера MuitiWii.
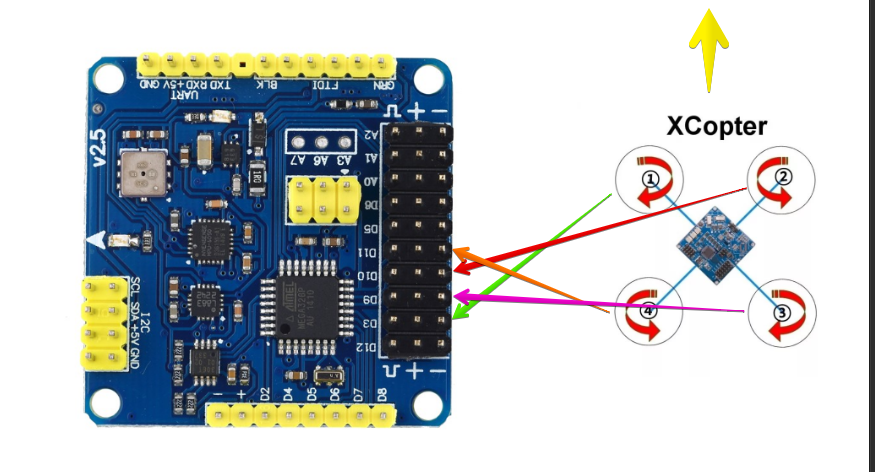
Открываем файл MultiWii\MultiWii.ino в Arduino IDE.Это основной файл, который потянет за собой открытие всех подключаемых. Теперь в вкладках находим config.h и в нем нам нужно подправить лишь раскомментировать строку define QUADX. Тем самым мы дадим прошивке знать, что она управляет Х коптером. Далее заливаем скетч как обычно для Arduino.
После сборки мы снова вернемся к программе для калибровке программой в папке MultiWiiConf.
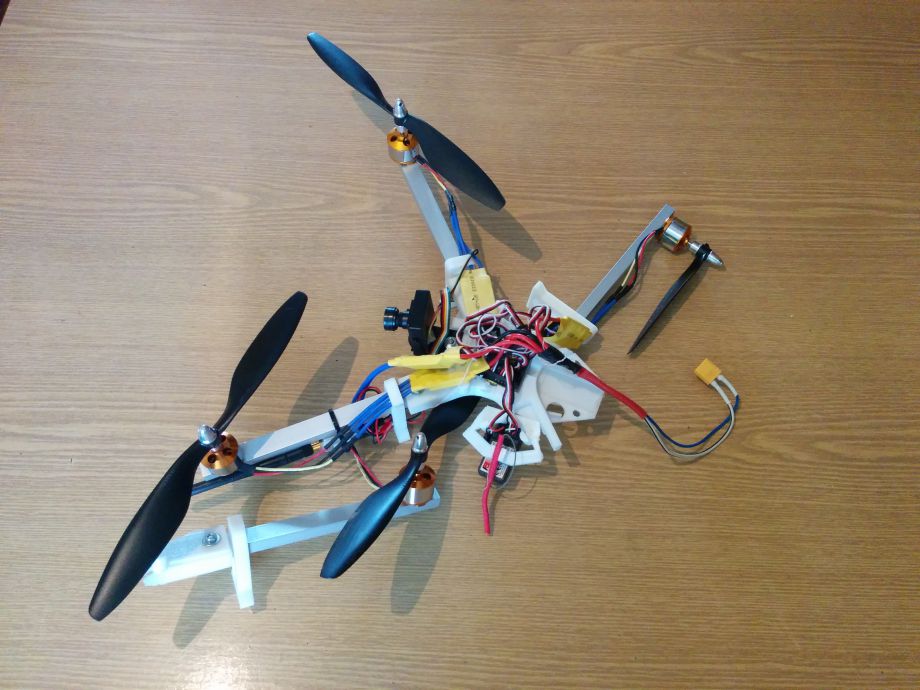
Основа моего коптера - платформа напечатанная на 3д принтере. Файлы для печати я приложу в конце статьи. Они в формате Autocad и их нужно будет конветировать в stl для слайсера.
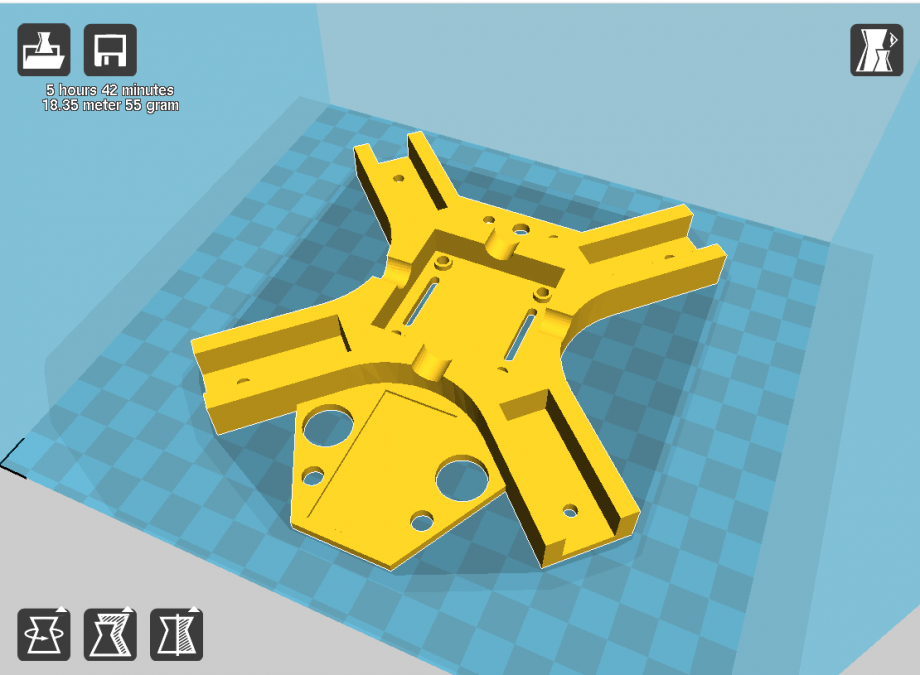
Это основная несущая деталь. В ней жестко крепится микроконтроллер MultiWii, есть прорези под аллюминевые профили - лучи - к которым крепятся ножки и двигатели. Снизу есть прорезь для липучки которая удерживает аккумулятор.
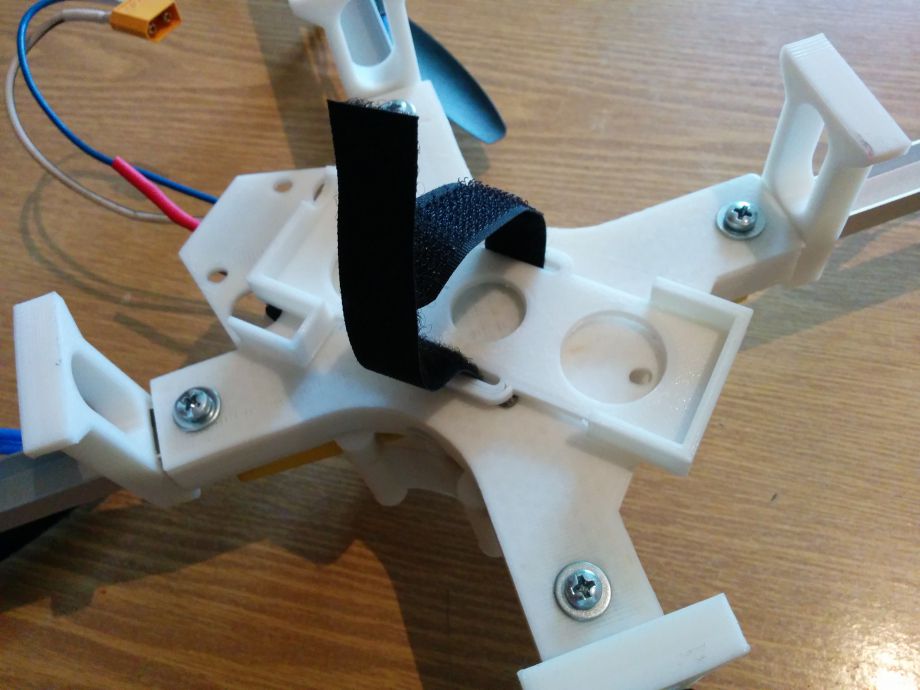
Аллюминиевый профиль был взят П-образный 15x10мм. Он разрезан на 4 равных куска длиной 200мм. В нем просверлены отверстия для крепления двигателей.

Сзади платформы углубление для приемника.
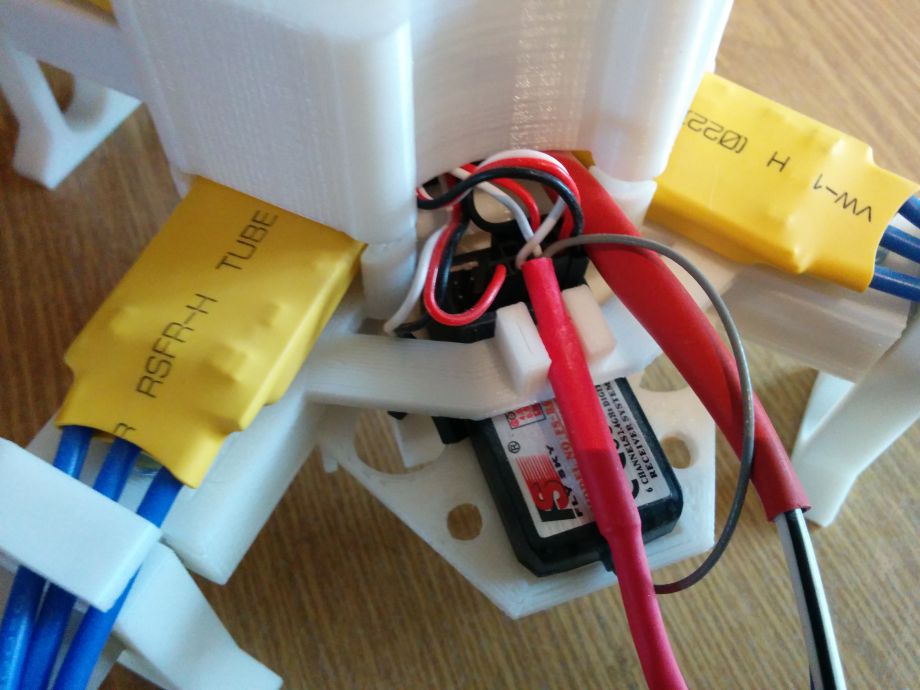
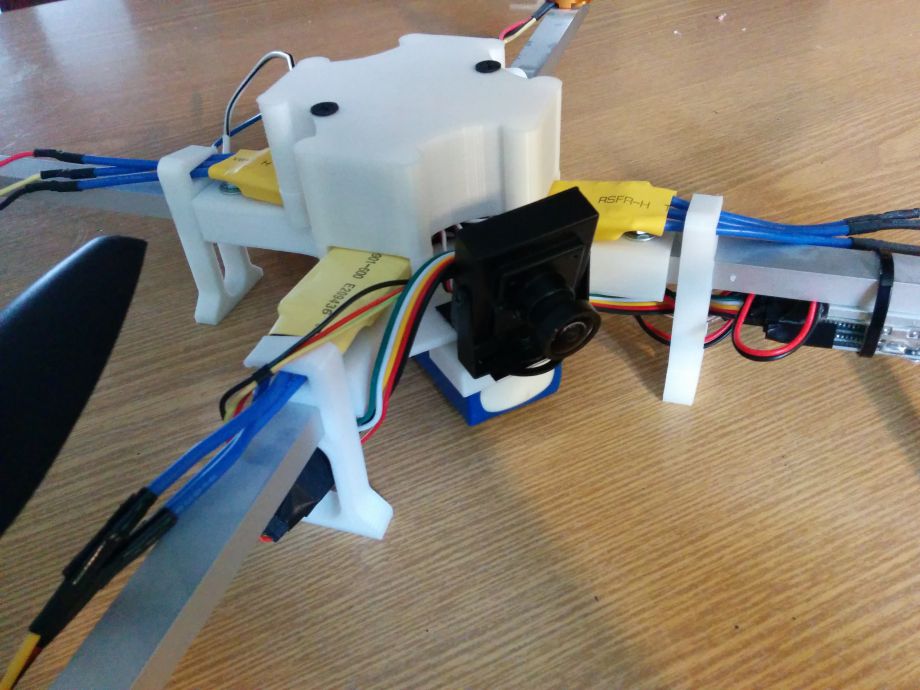
Из прочих деталей имеется верхняя платформа, которая запирает аллюминиевые лучи и фиксирует приемник. Сверху крепится крышка на два самореза. Под ней прячется моток проводов.

Для большего кайфа крепится видео камера CCV и видео передатчик на 5.8Ghz. Эта частита не пересекается с 2.4Ghz передатчика, что заведомо устраняет все возможные помехи.
Теперь пришло время заняться настройкой. Первое, что нам нужно сделать - откалибровать каждую из 4-ех ESC. В большинстве случаев на них одинаковая прошивка, но у нее может быть разная настройка и сбитая калибровка по скважности сигнала.
Для начала калибровки подключаем первую ESC напрямую к 3-ему каналу. Выполняем калибровку:
- Включить аппаратуру, газ на максимум
- Включить питание на модели
- Мотор при включении пропищит, затем еще раз пискнет
- Сразу же после этого убираем газ на ноль
- Мотор еще раз пропищит и начнет слушаться газа. Калибровка по скважности сигнала закончена.
Желательно выполнить сброс настроек на заводские для каждого ESC, потому нам нужно иметь конфигурацию: без плавного старта, без торможения двигателя, без резкого отключения двигателей. Для включения/выключенгия этих настроек можно приобрести карту программирования или настроить по "Пикам" войдя в меню"
- Включить аппаратуру, газ на максимум
- Включить питание на модели
- Мотор при включении пропищит, затем еще раз пискнет
- Газ не убираем, ждем. Прозвучит коротка мелодия - значит мы вошли в меню.
- Начнется перебор пунктов меню. Один писк - точка, длинный - тире.
- Тормоз (.)
- Тип батареи (..)
- Режим отсечки (...)
- Порог отсечки (....)
- Режим старта (.....)
- Тайминг (-.)
- Сброс (-..)
- Выход из меню (--)
- Дожидаемся Сброс (-..)
- Двигаем стик вниз (выбираем этот пункт меню)
- Один пик (активация)
- Двигаем стик вверх. При выборе будет сигнал. Сразу после него стик вниз - выход из меню.
Более подробно о настройке ESC по пикам в этом видео
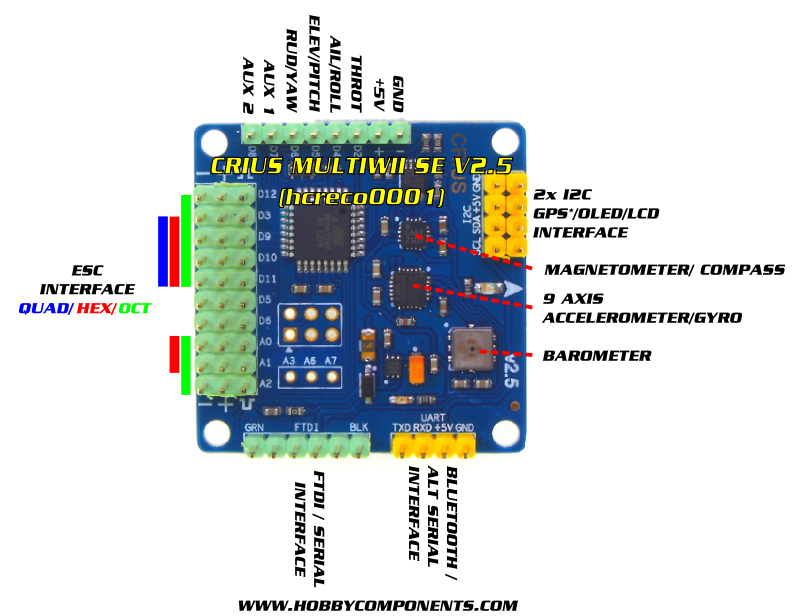
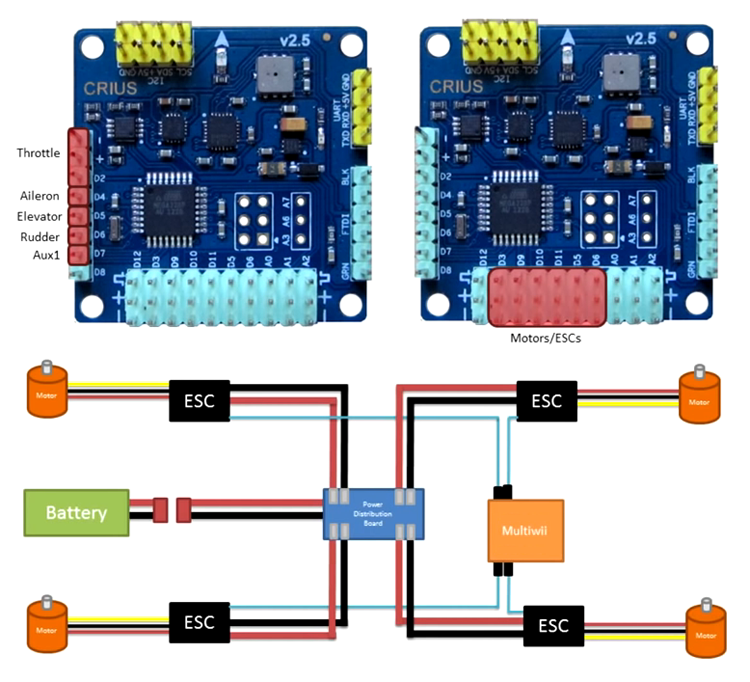
Теперь все наши моторы откалиброваны и одинаково настроены. Теперь нужно подключить все каналы и моторы к MultiWii SE согласно схеме:
Подключаем FTDI адаптер к MultiWii на нашем коптере. Запускаем программу из папки MultiWiiConf. Выбираем com порт который опознается как FTDI адаптер. Нажимаем READ, START.
Теперь откалибруем гироскоп. Ставим коптер ровно по уровню. Нажимаем CALIB_ACC. Контроллер запоминает настройки для уровня горизонта.
Теперь откалибруем магнитометр. Нажимаем CALIB_MAG. Делаем полный оборот.
Теперь откалибруем внесем изменения в PID. Можно использовать те, что видны на скрине. Нажимаем WRITE и все настройки зашиваются в контроллер. Настройка закончена.
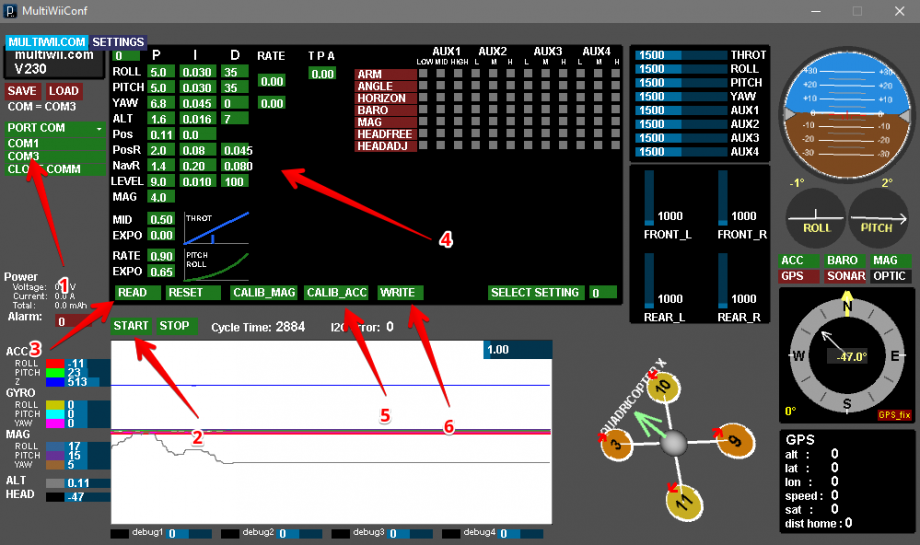
Пока мы не отключили FTDI и программу можно проверить правильно ли принимаются сигналы от пульта. При движении стиков будет отображаться значения их отклонения.
Внимание! Все настройки проводите с снятыми пропеллерами! Потому что это нереальная мясорубка.
Когда все настроено можно ставить пропеллеры. Обратите внимание, что все пропеллеры имеют строго определенное направление вращения. Еще 10 раз все проверьте и можно запускать.
Соблюдая всю возможную технику безопасности без опасности попасть под лопасти двигаем стиг газа вниз и вправо. Моторы запустятся. Вниз и влево - отключатся. Это так называемый арминг дизарминг. Стандартная фишка всх контроллеров.
Тренироваться в полетах нужно в безветренную погоду в открытом месте далеко от людей и имущества. Стиком газа работаем очень аккуратно. Резко на ноль его опускать нельзя иначе будет вот это:
Газ нужно плавно добавлять и так же плавно убавлять. На ноль его можно опускать только на земле иначе коптер потеряет устойчивость и начнет падать вращаясь в воздухе.
Берегите себя и коптер. Будьте осторожны.